
MM0474
Figure 11.
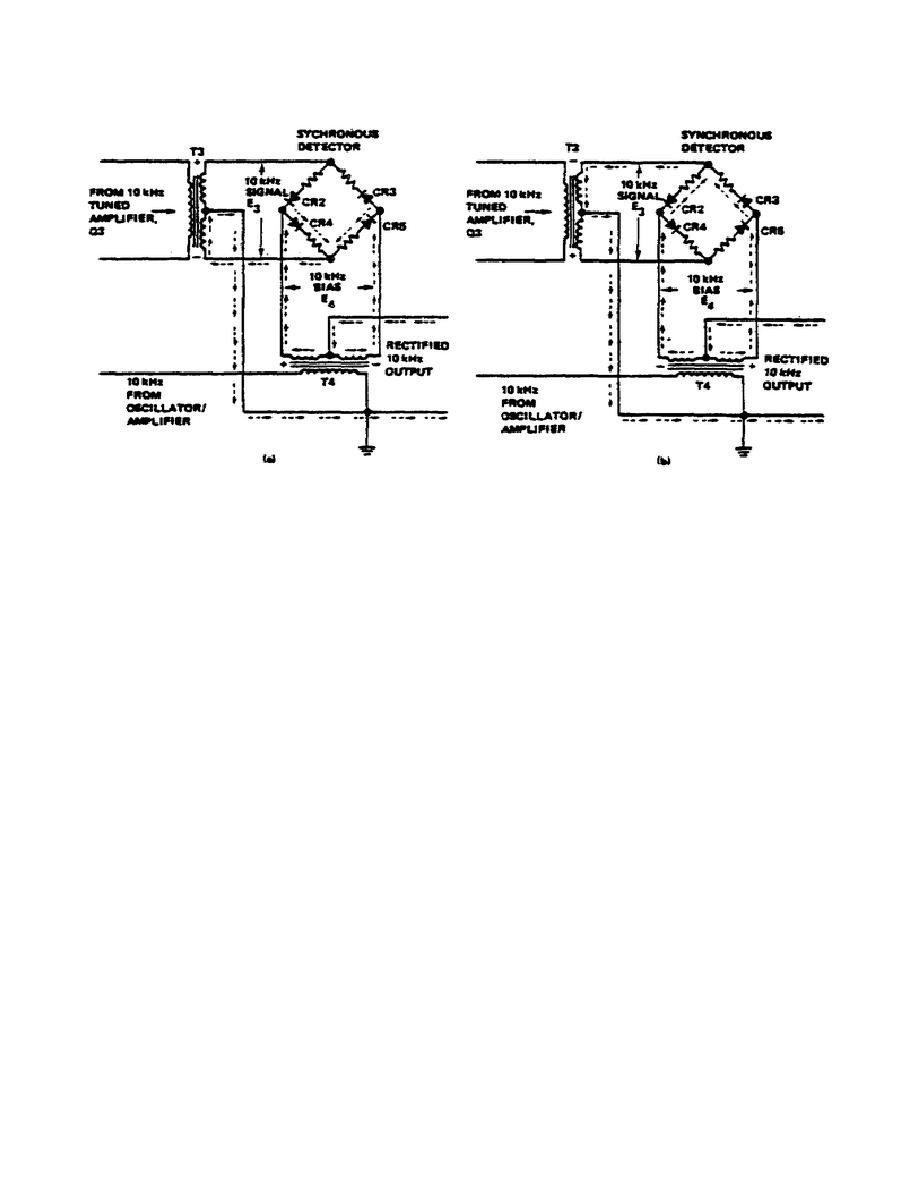
Synchronous Detector.
Figure 11(b), the diodes A1CR4 and A1CR5 are biased off. The resultant output
is a pulsating DC signal equivalent to the applied 10 kHz error signal. The
pulsating DC signal is filtered and applied to differential amplifier A1Q8 and
A1Q9.
(3) The operation of the synchronous detector requires an in-phase
relationship between E3 and E4. The amplitude of E4 must be greater than that
of E3 at all times.
l. Feedback Differential Amplifier.
A simplified schematic diagram of the feedback differential amplifier
is shown in Figure 12. The feedback circuit differential amplifier comprises
A1Q8, A1Q9, and associated circuitry.
Pulsating DC from the synchronous
detector is filtered by A1C19, A1C20, and A1R35, amplified by A1Q8 and fed to
both the feedback current-squared generator A1Q11, and the feedback current
generator A1Q10. Temperature compensation and low emitter circuit resistance
for A1Q10 and A1Q11 from excessive reverse bias when A1Q8 is not conducting.
m. Feedback Current Generator.
A simplified schematic diagram of the feedback current generator is
shown in Figure 13. The DC signal from the differential amplifier is applied
to the feedback current generator A1Q10.
A1Q10 serves two functions: 1) it
completes the metering loop to the metering bridge, and 2) it operates in
conjunction with the first 10 kHz amplifier, A1Q1,
28


 Previous Page
Previous Page
