
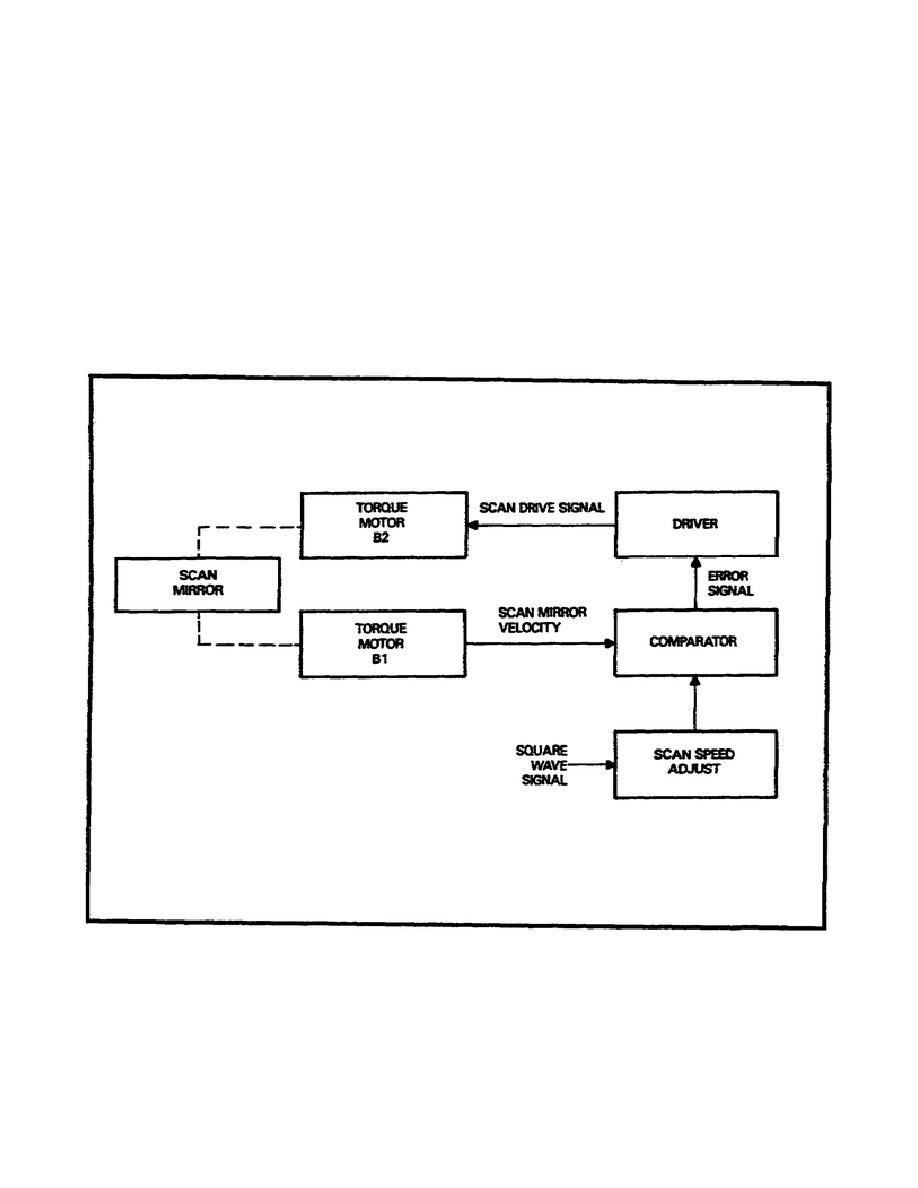
Scan Loop.
The scan loop (Figure 2-15) is a rate servo loop that causes the scan
mirror to cross the field-of-view at a constant velocity.
The
reference signal for the scan loop is a square wave that is applied
to the comparator. Also applied to the comparator is the scan mirror
velocity signal.
The comparator generates an error signal which is
used to drive and control the speed of torque motor B2.
The scan
drive signal maintains a constant scan mirror velocity across the
field-of-view.
When the scan mirror velocity reaches zero and the
mirror arm fully compresses the return spring, a square wave signal
reverses its polarity, causing the scan drive signal to drive the
mirror back across the field of view at a constant velocity.
Figure 2-15.
Scan Loop.
31
MM4812


 Previous Page
Previous Page
