
SM0486
b. As shaft "A" and the contactor are pressed against a rotating
object, the collar "B" is forced up shaft "A" by the centrifugal force of weights
"W" pulling outward, acting through pivots "C" and "D" and "E".
Note that the
pointer is attached to collar "B". Adjacent to this pointer is an RPM scale. The
faster the rotating object turns--the greater the force of weights "W" pulling
outward--the farther collar "B" will move carrying the pointer upscale.
c. The advantages of the mechanical tachometer are that it is
economical and simple to operate.
The major disadvantage of the mechanical
tachometer is its loading effect on the rotating object. For example, suppose the
maximum speed of a small electric motor is to be checked. Because of the loading
effect (slowing down) caused by the pressure of the mechanical tachometer, a true
maximum speed of rotation will not be indicated.
The other rotary measurement
divides in this section do not have a loading effect on the rotating object.
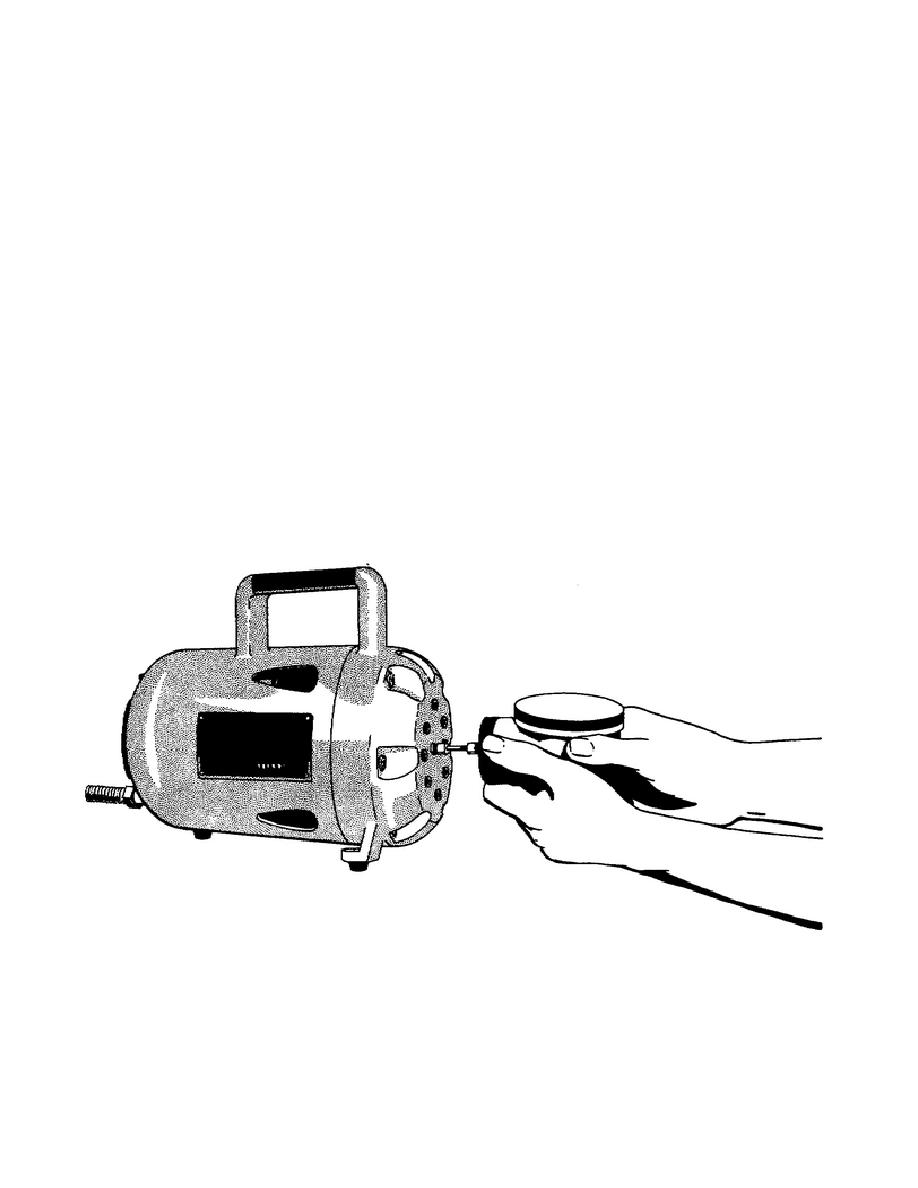
d. Mechanical tachometers can be calibrated by means of a tachometer
tester such as the Sweeney Model 1000 shown in Figure 4. The Sweeney Model 1000
tachometer tester is a synchronous motor with seven gear driven output shafts of
known rotational speeds. The rotating speed of the synchronous motor is as stable
as the frequency of the alternating voltage applied to it. Since the frequency of
the power supplied by major power companies is regulated to within 0.1 cps, the
rotational speed of the mechanical outputs of the Model 1000 is extremely accurate
and suitable as a standard for calibrating mechanical tachometers.
Figure 4.
Sweeney Model 1000 Tachometer Tester
82

 Previous Page
Previous Page
